Spacecraft Motion Planning
Research Question
How can we plan trajectories online for autonomous spacecraft navigation?
Summary
The objective of this research is to devise real-time, efficient and dependable algorithms for spacecraft autonomous maneuvering, with a focus on dynamic and cluttered environments. Specifically, we aim to devise technologies for the online planning of trajectories in proximity operations, which together with reliable environmental sensing and autonomous high-level decision-making is a key enabler for autonomous spacecraft navigation. To this end, we develop robot motion planning and trajectory optimization techniques, tailor them to aerospace mission constraints (e.g., unique dynamics and environments, often limited computation, etc.), and apply them to aerospace hardware platforms, both on ground test beds and in space.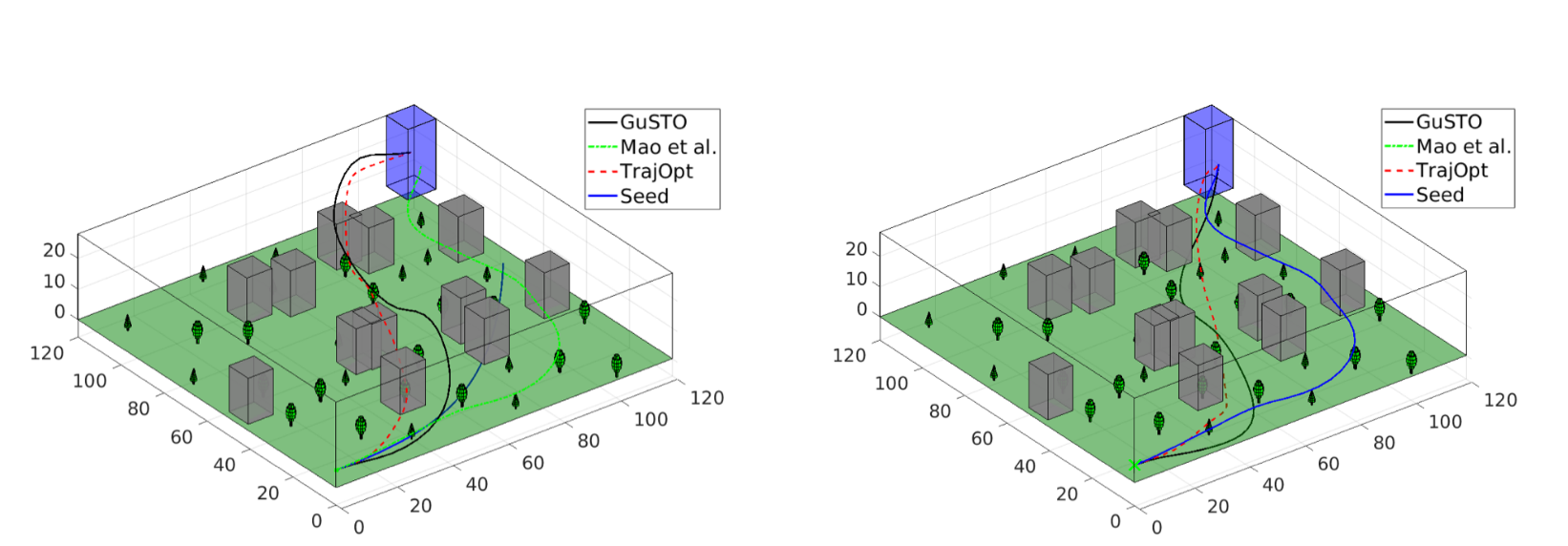
Related Works
-
R. Bonalli, A. Cauligi, A. Bylard, and M. Pavone, “GuSTO: Guaranteed Sequential Trajectory Optimization via Sequential Convex Programming,” in Proc. IEEE Conf. on Robotics and Automation, Montreal, Canada, 2019. (Submitted)
Abstract: Sequential Convex Programming (SCP) has recently seen a surge of interest as a tool for trajectory optimization. Yet, most available methods lack rigorous performance guarantees and are often tailored to specific optimal control setups. In this paper, we present GuSTO (Guaranteed Sequential Trajectory Optimization), an algorithmic framework to solve trajectory optimization problems for control-affine systems with drift. GuSTO generalizes earlier SCP-based methods for trajectory optimization (by addressing, for example, goal region constraints and problems with either fixed or free final time), and enjoys theoretical convergence guarantees in terms of convergence to, at least, a stationary point. The theoretical analysis is further leveraged to devise an accelerated implementation of GuSTO, which originally infuses ideas from indirect optimal control into an SCP context. Numerical experiments on a variety of trajectory optimization setups show that GuSTO generally outperforms current state-of-the-art approaches in terms of success rates, solution quality, and computation times.
@inproceedings{BonalliCauligiEtAl2019, author = {Bonalli, R. and Cauligi, A. and Bylard, A. and Pavone, M.}, title = {{GuSTO:} Guaranteed Sequential Trajectory Optimization via Sequential Convex Programming}, booktitle = {{Proc. IEEE Conf. on Robotics and Automation}}, year = {2019}, note = {Submitted}, address = {Montreal, Canada}, month = may, url = {/wp-content/papercite-data/pdf/Bonalli.Cauligi.Bylard.Pavone.ICRA19.pdf}, keywords = {sub}, owner = {bylard}, timestamp = {2018-10-04} } -
J. A. Starek, E. Schmerling, G. D. Maher, B. W. Barbee, and M. Pavone, “Real-Time, Propellant-Optimized Spacecraft Motion Planning under Clohessy-Wiltshire-Hill Dynamics,” in IEEE Aerospace Conference, Big Sky, Montana, 2016.
Abstract: This paper presents a sampling-based motion planning algorithm for real-time, propellant-optimized autonomous spacecraft trajectory generation in near-circular orbits. Specifically, this paper leverages recent algorithmic advances in the field of robot motion planning to the problem of impulsively-actuated, propellant-optimized rendezvous and proximity operations under the Clohessy-Wiltshire-Hill (CWH) dynamics model. The approach calls upon a modified version of the Fast Marching Tree (FMT*) algorithm to grow a set of feasible and actively-safe trajectories over a deterministic, low-dispersion set of sample points covering the free state space. Key features of the proposed algorithm include: (i) theoretical guarantees of trajectory safety and performance, (ii) real-time implementability, and (iii) generality, in the sense that a large class of constraints can be handled directly. As a result, the proposed algorithm offers the potential for widespread application, ranging from on-orbit satellite servicing to orbital debris removal and autonomous inspection missions.
@inproceedings{StarekSchmerlingEtAl2016b, author = {Starek, J. A. and Schmerling, E. and Maher, G. D. and Barbee, B. W. and Pavone, M.}, title = {Real-Time, Propellant-Optimized Spacecraft Motion Planning under {Clohessy-Wiltshire-Hill} Dynamics}, booktitle = {{IEEE Aerospace Conference}}, year = {2016}, address = {Big Sky, Montana}, doi = {10.1109/aero.2016.7500704}, month = mar, owner = {bylard}, timestamp = {2017-01-28}, url = {/wp-content/papercite-data/pdf/Starek.Schmerling.ea.AeroConf16.pdf} }